[2016] Cutaneous Contact Hardness Interface
- Kevin Gim
- 2017년 11월 18일
- 2분 분량

최종 수정일: 2022년 3월 29일
2016, Center of Robotics Research, Korea Institute of Science and Technology(KIST)
In 2016, during a research trainee position at Korea Institute of Science and Technology, I develop a cutaneous contact hardness interface for a cutaneous haptic research project [1]. The objective of the mechanism is to present the hardness by giving desired pressure to user's fingertip. There are several off-the-shelf force feedback interfaces can provide a kinesthetic force feedback, yet they have limited torque output due to the size and force controllability. By adding a cutaneous feedback accompanying with the kinesthetic force feedback, an user can perceive more rigid feeling than only the kinesthetic force interfaces can display.

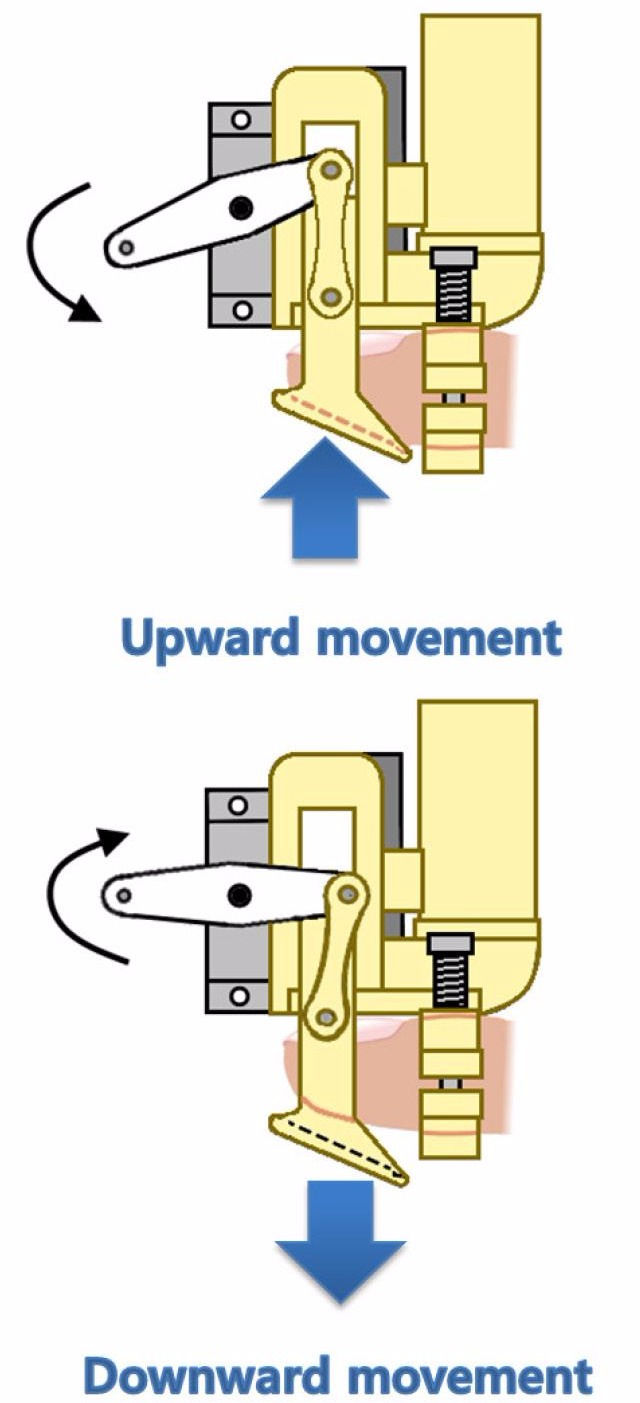
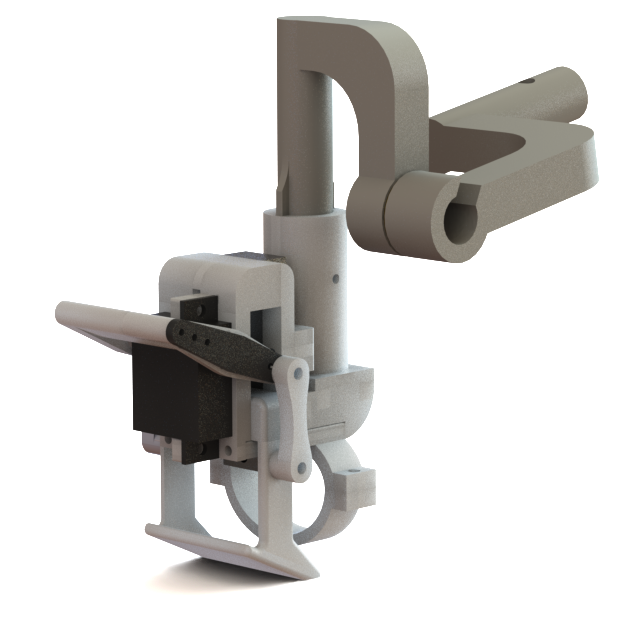
The figures above show the cutaneous haptic interface to change contact force at the fingertip. A miniature servo-motor is used to power the interface and 3d printed mechanical linkages transmit a motor torque to a contacting plate. A linear potentiometer reads the displacement of the plate. A FSR sensor is installed on the contact plate to measure the contact force. A pair of springs tightly fixes the haptic interface to a user’s fingertip. The weight of the cutaneous interface is only 28 g.

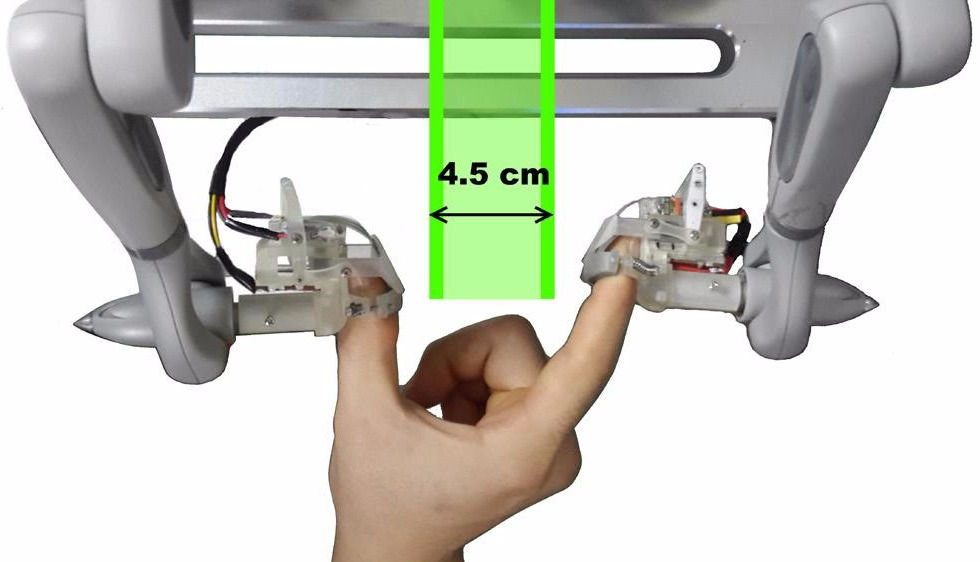
The cutaneous interface is designed to be installed on commercially available force-feedback interfaces as shown in the figure above. Then, a user can feel a virtual object’s surface hardness by both cutaneous and kinesthetic feedback. The experiment show that by collaborating cutaneous cues and kinesthetic cues, participants can distinguish the surface hardness more precisely that just with a cutaneous or kinesthetic feedback alone. The approach proposed in the study can be exploited by a wearable haptic interface to create the effect of touching harder surfaces even when the actuators can only exert relatively low torques.
[1] J. Park, J. Kim, Y. Oh and H. Z. Tan, "Compensation of perceived hardness of a virtual object with cutaneous feedback," 2017 IEEE World Haptics Conference (WHC), Munich, 2017, pp. 101-106.
댓글