[2015] Smart Fitness Machine "HULKRO"
- Kevin Gim
- 2017년 11월 5일
- 4분 분량

최종 수정일: 2022년 3월 29일
2015, Undergraduate Thesis Project
1. Motivation
For undergraduate thesis project, I invented a smat fitness machine named "HULKRO" which provides various exercise modes and controllable exercise resistance. Also the machine can be communicate with a smartphone.
I had grown the idea about a new fitness machine for a long time. I have wanted to do workout regularly, yet it have been hard to keep because of busy schedules, personal laziness or expensive gym fee. I have felt the necessity of a multi functional fitness machine which allows me to workout in my own place. However, the conventional machines for a home gym were usually extremely expensive or too bulky to place them in my home. Therefore, I decided to develop a new type of exercise machine.
The key point of my invention was two things. First, the machine should be compact and lightweight that can be installed in any place. Second, the resistance should be controllable to a desired intensity. There have been many existing resistance mechanisms such as using weight, springs, elastic bends, pneumatic and hydraulic actuators. Among them, weight have been the most preferred method since it provides constant load which is called an isotonic exercise. The isotonic exercise has been considered as the most efficient way for muscle growth. Also exercisers prefer exercises using weight since the load can be adjusted easily.
However, weight stacks have some drawbacks which are bulky volume, heavy weight and expensive price. For example if you want to lift 100kg, you need at least 100kg of weight plates plus the weight of the machine. Also the weight plate used in fitness machines are quite expensive causing high price of the exercise machines. Some fitness machines using pneumatic and hydraulic was developed, but have been not welcomed by customers. Usually the machine was somewhat bulky, noisy, costly and mostly failed to realize constant load.
The objective of the project was to develop a novel motorized resistance mechanism for exercise which has characteristic of controllable load, compact size, and smartphone connectivity.
2. Resistance Mechanism
The main principle of the resistance mechanism is inspired from the Hooke's Law. In order to implement the force control with undergraduate level expertise, the approach was made by converting force control to position control. I place springs between a handle and motor so that can measure exerted force by measuring the deformation of a spring. In addition applying low stiffness elasticity makes the system much safer from malfunction and impact which can be an important characteristic for a human-interaction device. After I entered a grad school, I realized that this mechanism resembles the "Series Elastic Actuator" which is a cutting-edge technology that used in robotics field. However, the idea of the mechanism came to me without knowing existing concept.


The conceptual idea was validated by a simulation and prototype hardware.


In the resistance mechanism, there is a ball screw to convert rotational motion of a motor to translational motion. Also there are two carts on a linear guide, one is connected with a screw nut and the other one is connected with a handle which is dragged by an user. The two carts are coupled with springs which produce resistance force and its intensity is proportional to the stretched length of the springs. In other words, the motor manipulates the cart connected to the screw nut to maintain an arbitrary length of the springs while the user moves the other cart using the handle.
An IR sensor had been utilized to measure the deformation, but because of poor accuracy and noise of the sensor, a wire encoder was introduced. The wire encoder was made from an incremental rotary encoder, a torsional spring, and fishing wire. I used LS7166 counter chip to read the encoder value.
3. Adjustable Arm Mechanism

The adjustable arm angle allows the machine provide various exercise modes.
To make the arm angle adjustable as well as firmly fixed when they are in a desired angle, a power screw and rack & pinion mechanism were applied.
With the adjustable-arms, the machine provides various modes for more than eight exercises. This is very valuable characteristic for a home gym training apparatus because the exercisers don't need a bulky or multiple machines for various kinds of workouts.


4. Micro controller unit and Android Application Development
Arduino MEGA was utilized as a Micro controller unit of the exercise machine. Also it used bluetooth communication to connect the device with a smartphone. An android application was developed as an user interface.

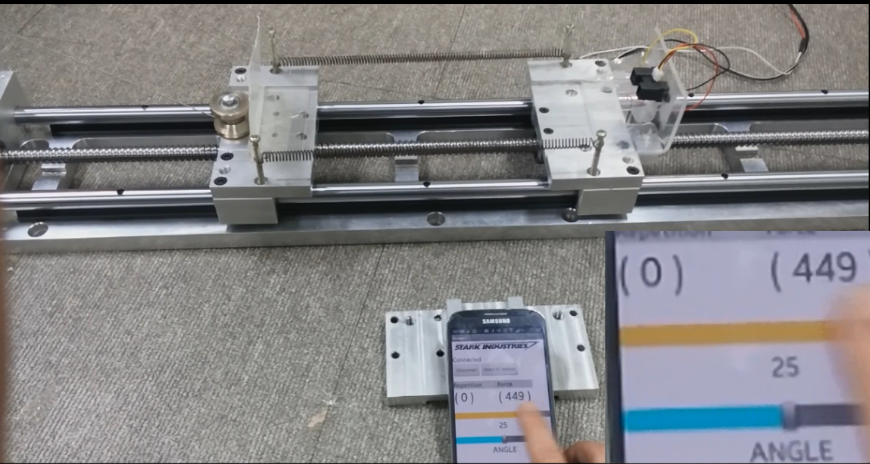
With the application, the user can set the arm angle and resistance intensity with a smartphone interface. Also, the users can get feedback of their exercises by recording the weight and repetition of their workout automatically.
5. Conclusion


The complete assembly of a multi-functional exercise machine with a novel motorized resistance mechanism is presented above. The proposed mechanism has benefit of providing a controllable exercise resistance with a smartphone interface and has a compact volume and size that will work as a next generation workout machine for efficient and cost effective home-gym system.
In addition, because the new resistance mechanism doesn't use gravity, the mechanism
can be used in muscle training for a micro gravity environment during a space mission.
NASA released their new space exercise machine MED-2 in 2016, which has almost same mechanism with my invention but used rotary spring instead of linear spring.
This project was recommended to the national and international invention fair as an university representative and also invited to exhibit at 2014 Engineering Education Festival hosted by Ministry of Education of Korea. The patent was applied in Korea in 2014, registered in 2016 with title: "Weight Training Apparatus Having Load-balancing Device, Rehabilitation Medicine Apparatus Having the Same, and Operating Method Thereof."
댓글